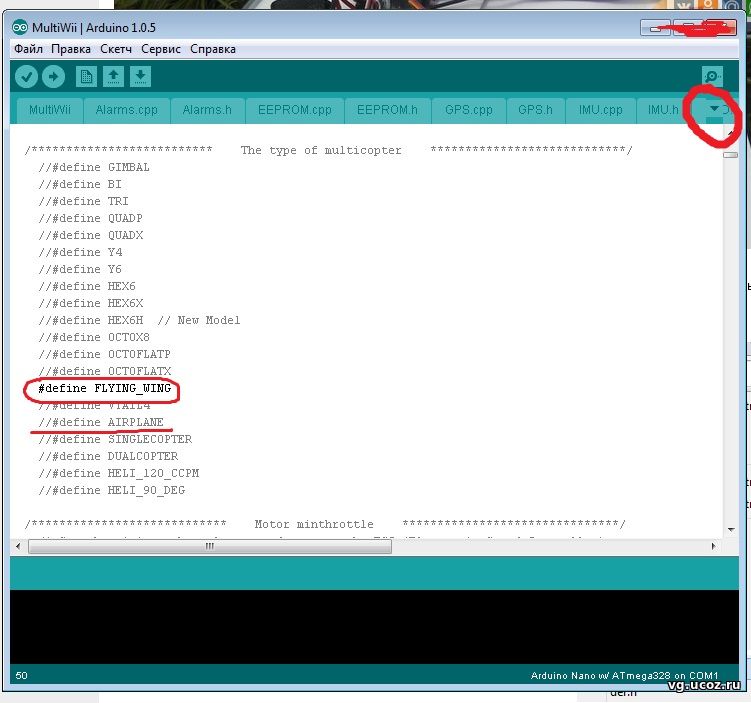
Нужно внести 3 поправки в код прошивки, которую вы скачали. В среде Arduino нажимаем Файл-открыть-MultiWii.ino Далее открываем для редактирования конфигурационный файл config.h: ( файл открывается прям с меню ардуино - я обвел красным кругом )
Тут нужно раскомментировать строки:
Выбираем летательный аппарат
/************************** The type of multicopter ****************************/ //#define GIMBAL //#define BI //#define TRI //#define QUADP //#define QUADX //#define Y4 //#define Y6 //#define HEX6 //#define HEX6X //#define HEX6H // New Model //#define OCTOX8 //#define OCTOFLATP //#define OCTOFLATX #define FLYING_WING - для летающего крыла //#define VTAIL4 //#define AIRPLANE
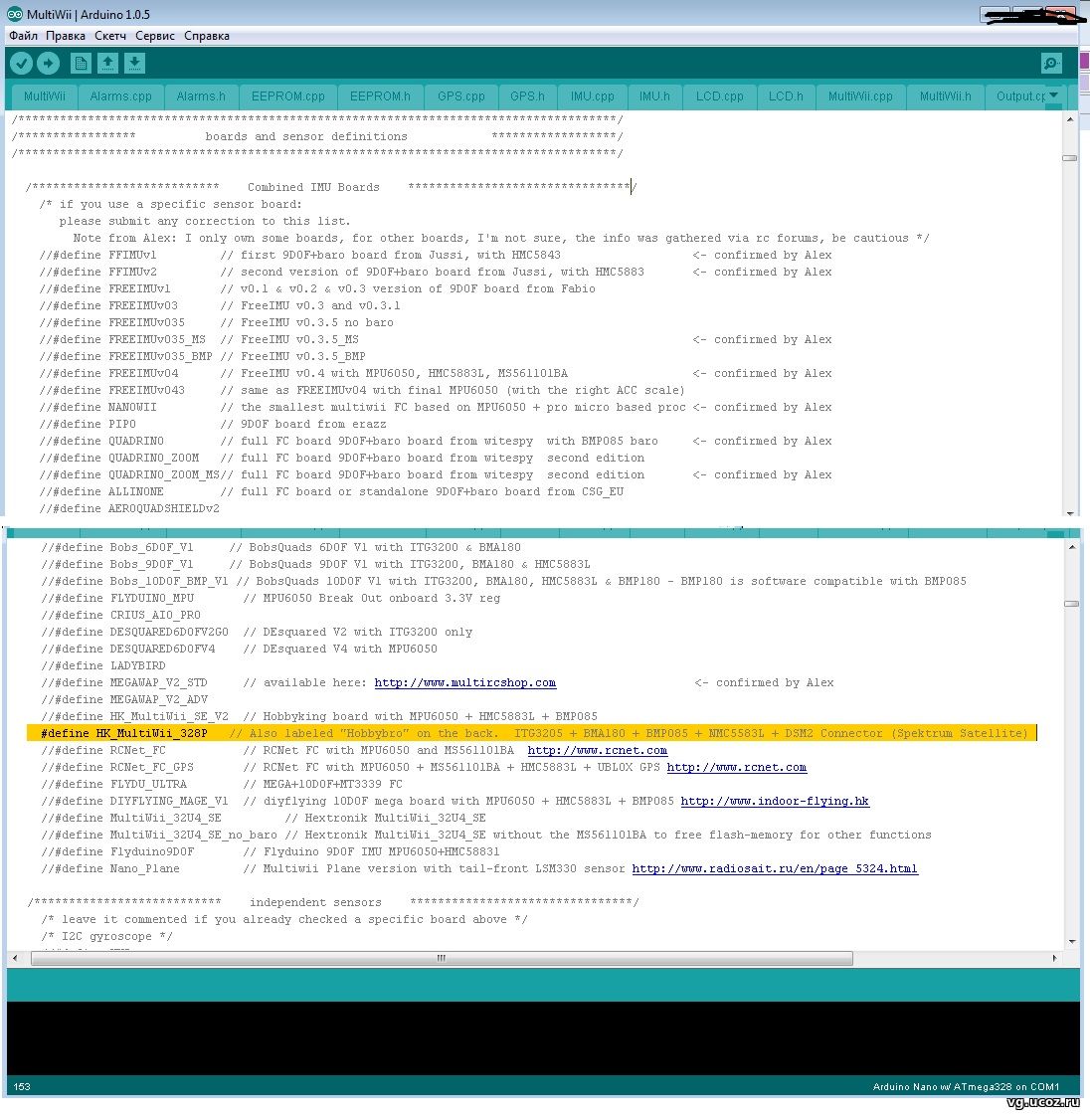
Выбираем свою плату
/*************************** Combined IMU Boards ********************************/ /* if you use a specific sensor board: please submit any correction to this list. Note from Alex: I only own some boards, for other boards, I'm not sure, the info was gathered via rc forums, be cautious */ //#define FFIMUv1 // first 9DOF+baro board from Jussi, with HMC5843 <- confirmed by Alex //#define FFIMUv2 // second version of 9DOF+baro board from Jussi, with HMC5883 <- confirmed by Alex ........................................................ //#define MEGAWAP_V2_STD // available here: https://u.to/HOs2Fg <- confirmed by Alex //#define MEGAWAP_V2_ADV //#define HK_MultiWii_SE_V2 // Hobbyking board with MPU6050 + HMC5883L + BMP085 #define HK_MultiWii_328P // Also labeled "Hobbybro" on the back. ITG3205 + BMA180 + BMP085 + NMC5583L + DSM2 Connector (Spektrum Satellite) //#define RCNet_FC // RCNet FC with MPU6050 and MS561101BA https://u.to/Gus2Fg //#define RCNet_FC_GPS // RCNet FC with MPU6050 + MS561101BA + HMC5883L + UBLOX GPS https://u.to/Gus2Fg //#define FLYDU_ULTRA // MEGA+10DOF+MT3339 FC
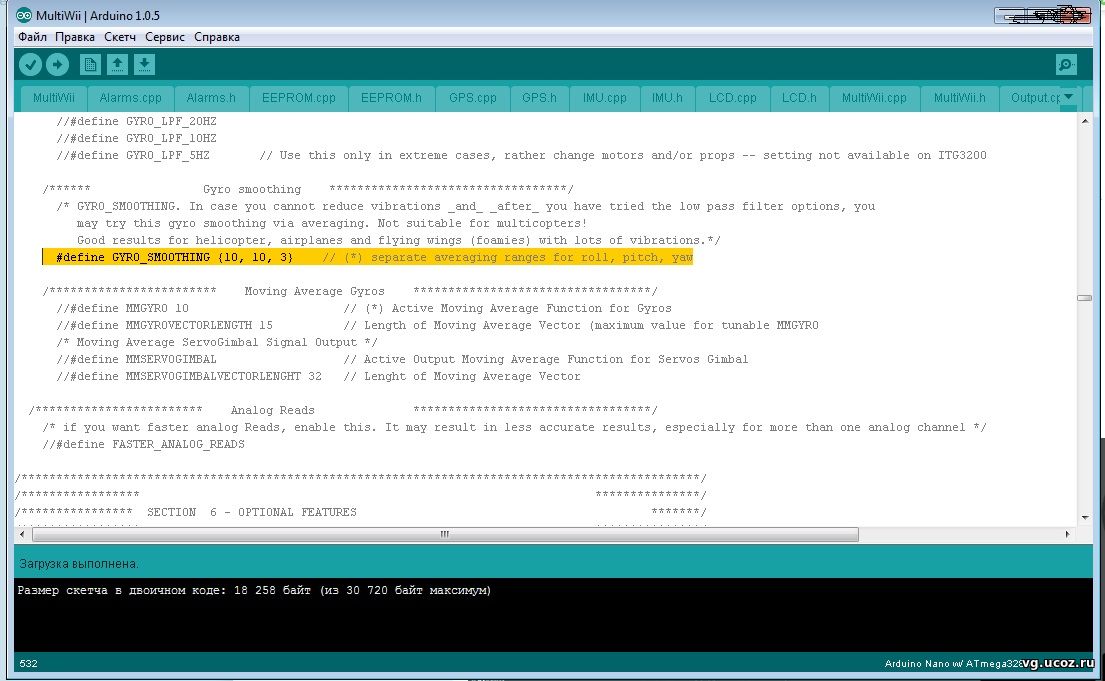
Что бы уменьшить вибрации вы можете попробовать это сглаживание гироскопа с помощью усреднения.
/****** Gyro smoothing **********************************/ /* GYRO_SMOOTHING. In case you cannot reduce vibrations _and_ _after_ you have tried the low pass filter options, you may try this gyro smoothing via averaging. Not suitable for multicopters! Good results for helicopter, airplanes and flying wings (foamies) with lots of vibrations.*/ #define GYRO_SMOOTHING {10, 10, 3} // (*) separate averaging ranges for roll, pitch, yaw
Сохраняем код ( Файл->Сохранить ) Выбираем соответсвующий порт ( у меня COM-7 ) Выбираем плату - Arduino Nano 328 Загружаем в плату ( Файл->Загрузить )
3) Затем запускаем программу-конфигуратор ( MultiWiiConf ), попутно установив или обновив Java ( программа скачивается одним архивом с прошивкой )
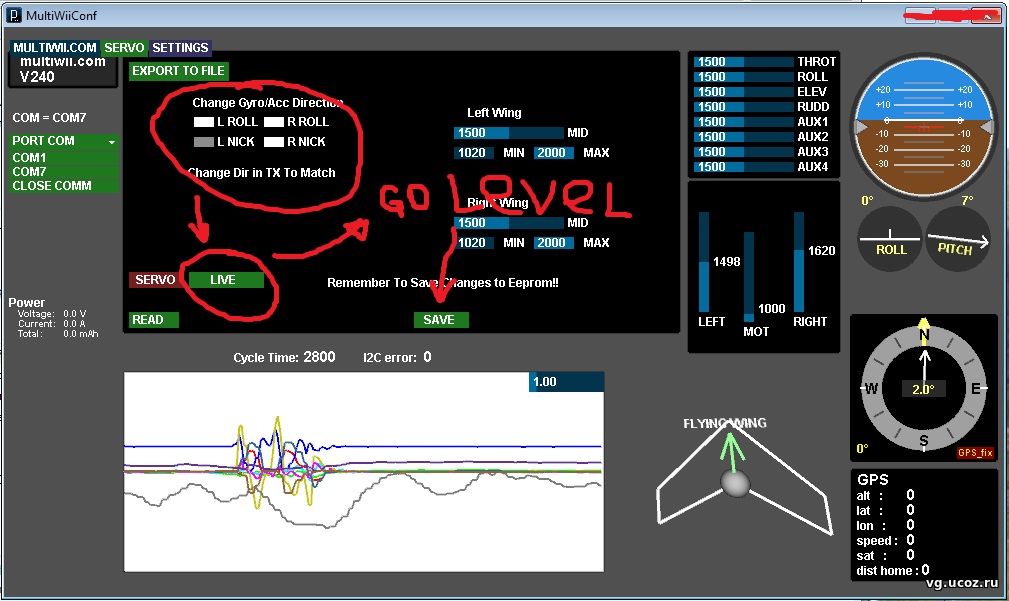
В конфигураторе выбираем соответсвующий COM-порт
а) Кладем плату горизонтально на стол и калибруем гироаксель и компас
в) конфигурируем L-Roll, R-Roll, L-Nick, R-Nick согласно установленным сервоприводам ( мой вариант подключения описан ниже ) г) устанавливаем плату строго горизонтально и жмем LAVEL->GO LAVEL ( выставляем уровень на сервоприводах в нейтральное положение, согласно выбранной конфигурации ) д) жмем SAVE
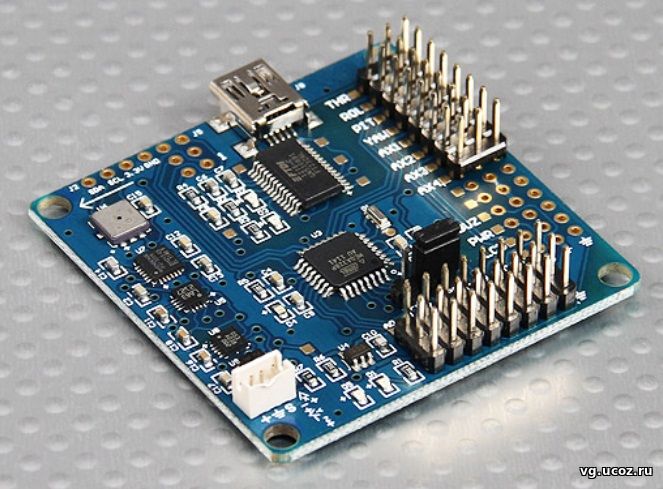
4) Подключение
A0, A1, A2, D12,D11, D3, D10, D9 — к ним подключаются регуляторы скорости и сервоприводы (соответствуют выводам на Arduino). THR, ROLL, PITCH, YAW — предназначены для подключения соответствующих выводов приемника.
Сервоприводы на самолете установлены зеркально! при конфигурации это нужно учесть.
Ни каких миксов ( микшеров ) в аппаратуре быть не должно! Просто три канала: ch1-крен (ROLL), ch2-тангаж (PITCH), ch3-газ (THROTLLE) Соответственно приемник подключаю к полетному контроллеру так: ch1 в ROLL, ch2 в PIT, Регулятор мотора подключен напрямую в приемник. Сервоприводы подключаю через полетный контроллер: правый элевон ( ch2-pitch ) в D12, а левый элевон ( ch1-roll ) в D11
Питание +5 Вольт беру с регулятора мотора.
В итоге получился некий стабилизатор полета Если нос задирается вверх, то оба элевона резко опускаются вниз, увеличивая подъемную силу за ЦТ и тут-же занимают нейтральное положение. Если самолет кренится на правый бок, то правый элевон резко опускается вниз, увеличивая подъемную силу на правом полукрыле и тут-же занимает нейтральное положение, а левый элевон наоборот, поднимается вверх, уменьшая подъемную силу на левом полукрыле и тоже сразу занимает нейтраль.