На оф сайте ардупилота обозначен как Matek 4525DO
https://ardupilot.org/plane/docs/airspeed.html
На оф сайт Matek указано, что используется датчик ms4525do ( MEAS MS4525DO )
http://www.mateksys.com/?portfolio=aspd-4525#tab-id-2
datasheet на ms4525do https://www.avrfreaks.net/sites....5DO.pdf
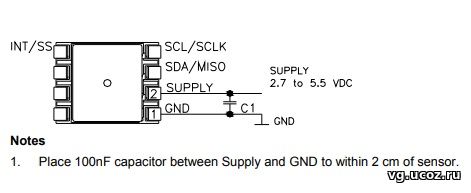
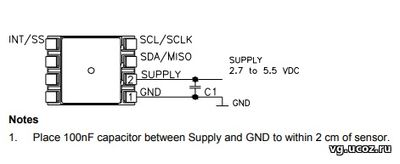
находим распиновку
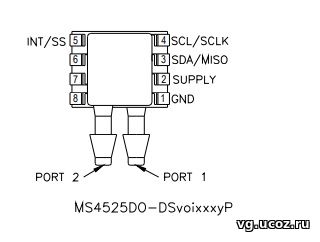
GND - [Pin 1] - Ground
SUPPLY - [Pin 2] - Positive Supply Voltage
SDA MISO - [Pin 3] - I2C Data SPI Data
SCL SCLK - [Pin 4] - I2C Clock SPI Clock
INT SS - [Pin 5] - I2C Interrupt SPI Chip Select
Порт1 - динамика
Порт2 - статика
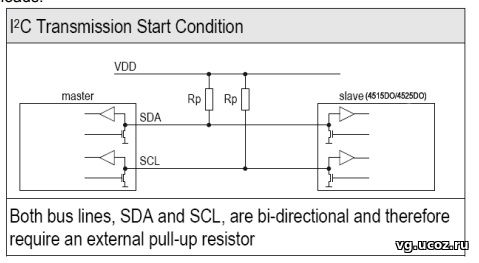
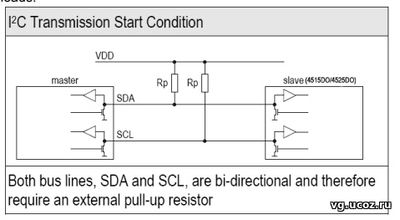
подтягивающие резисторы в 1 КОм
Питание от 3,3 до 5 Вольт
Поместите конденсатор емкостью 100 нФ между питанием и GND на расстоянии не более 2 см от датчика.
Повесил диод в цепь питания. От переполюсовки и от перенапряжения.. ( на диоде будет падение )
******
Порт1 - динамика
Порт2 - статика
Цитата
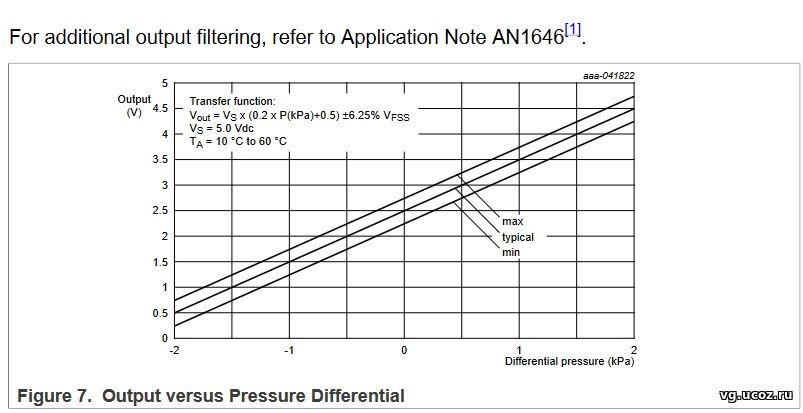
Выход пропорционален разнице между Портом 1 и Портом 2.
На выходе положительное значение, когда Порт 1> Порт 2. ( Отрицательное, когда наоборот )
Выход составляет 50% от общего числа, когда
Порт 1=Порт 2.
************
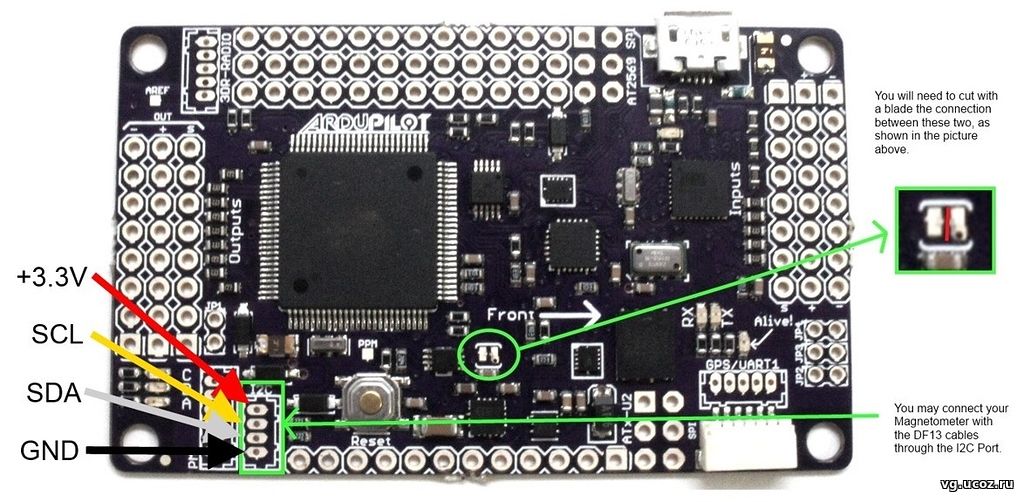
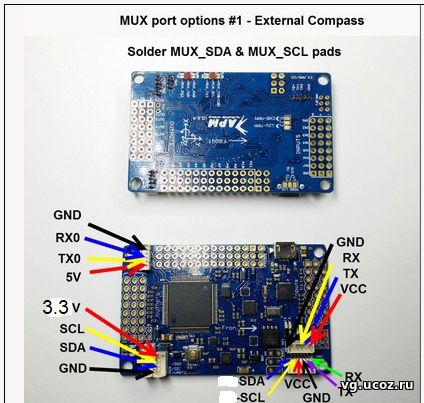
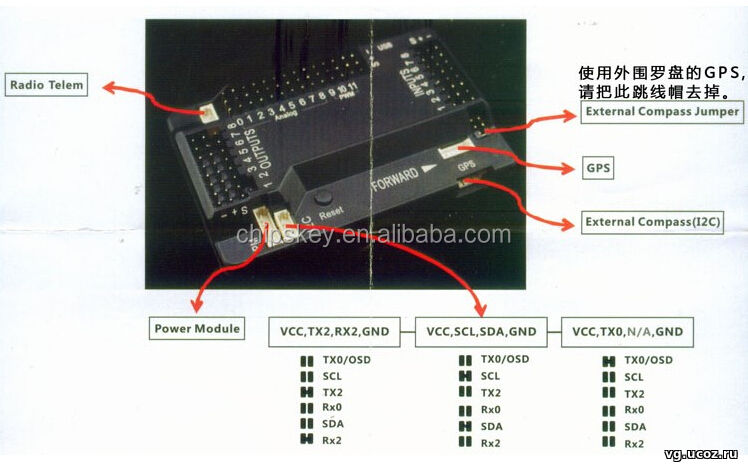
Для подключения к АПМ (i2c)
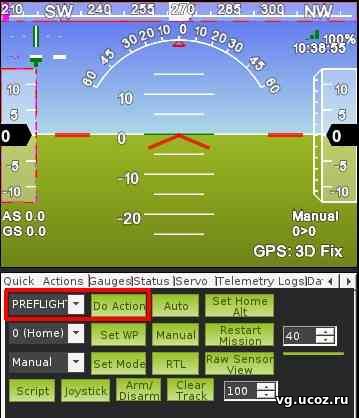
Setup>>Optional Hardware>Airspeed
Enable - ставим галочку ( Use airspeed - опционально )
Pin=PX4/Pixhawk Eagle Tree or MEAS
при этом в Full Parameter List установится ARSPD_PIN в значение "65"